# Bluetooth® Direction Finding

Image source: https://www.elsate.com/...
Various positioning services have always been in demand. The best known tracking system is probably GPS. Besides the large area-wide availability, this system has some disadvantages. For example, GPS can only calculate the position to within a few meters and only works outdoors. Real-time positioning services (RTLS) are increasingly required, which can calculate a position in real time with centimetre accuracy. These tracking services are often used in buildings where GPS does not work. For such services, many proprietary systems based on Bluetooth or WLAN triangulation have been developed. A common way of calculating the position, for example, was to use triangulation of the signal strength (RSSI). Fortunately, with version 5.1, an optional feature has been added to Bluetooth technology, allowing the development of positioning service solutions that meet centimetre-precise performance requirements.
# Adding Direction Finding
Radio direction finding is the practice of determining a direction from which a received signal has been transmitted. This has been common practice since the early twentieth century and is used in various systems. From aviation to nautical navigation and wildlife tracking, this practice is used in a variety of applications. With version 5.1 of the Bluetooth Core Specification, Bluetooth has been extended by an optional radio direction finding. A Bluetooth device can use this function to determine the direction of a signal sent by another Bluetooth device such as a mobile phone or tablet. This extension has the potential to improve Bluetooth location services and provide broader support. Previous Bluetooth location services use RSSI to estimate the distance of the sending device. Such location services are based on triangulation using multiple evaluation stations. Now the same devices can also be used to determine the direction of reception and thus improve the position accuracy. The radio direction finding of the new Bluetooth Core Specification supports two methods of direction finding based on the use of an antenna array: angle of arrival (AoA) and angle of departure (AoD).
# Direction Finding Using Angle of Arrival (AoA)

Image source: https://www.bluetooth.com/...
With the Angle of Arrival method (AoA), a Bluetooth beacon, to which the direction is to be determined, transmits a special direction finding signal with a single antenna. The receiver in the same RTLS solution, which has several antennas in an antenna array, can detect a signal phase difference due to the difference in distance between the individual antennas. The receiver takes the IQ samples of the signal while switching between the individual active antennas. With this data, the signal direction can be calculated. AoA systems are intended for use with RTLS as well as item finding and point-of-interest information services (PoI).
# Direction Finding Using Angle of Departure (AoD)
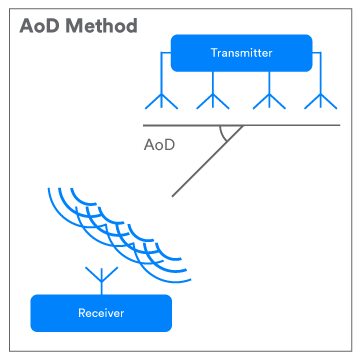
Image source: https://www.bluetooth.com/...
With the Angle of departure method (AoD) the device to which the direction is to be determined sends a special signal. This signal is transmitted simultaneously with several antennas in an array. The receiving device, for example a mobile phone, only needs one antenna. As the multiple signal crosses the antenna in the receiving device, the receiving device takes IQ samples. With this IQ sample data, the receiver can now calculate the relative signal direction. The AoD method is intended for use in IPS solutions, such as determining the path in a building.
Sources from https://www.bluetooth.com/...